Tracking segmented objects
Once the segmentation has been optimized, we can add the tracking operation to our pipeline.
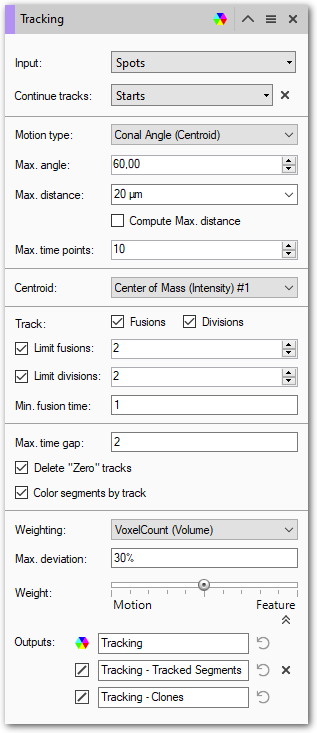
The tracking operation offers a range of parameters that must be set according to the needs of the analysis. As stated above, when tracking we identify objects at every time point and then try to establish the connection between these objects. What is allowed or not is depending on the parameters of the operation. Broadly these parameters tell the algorithm:
- How the objects are likely to move - are they likely to move in a more or less straight line or is the movement more chaotic?
- How far they are likely to move - please see above regarding sampling resolution
- How much do we expect the objects to change - do we expect to mostly retain their shape/intensity, or change, are they expected to merge/divide?
Motion type
The main aim of specifying the motion type is to facilitate the correct identification of objects from one timepoint to the next. When several objects are moving around in 3D space, it is quite likely that at some point ambiguous situations arise when multiple candidates might be considered as the tracked object.
In Vision4D, 3 methods of motion detection are available:
- If the objects are generally moving in a straight line then a linear regression algorithm is best. that way, if two objects come into close proximity from differing directions we assume that the one most aligned with the previous movement is most likely to be the same object. Of course this method doesn't perform as well if the objects don't move in a straight line.
- If the objects generally move forward, but sometimes veer in one direction or another then the Conal Angle approach will be better suited. In this case, we define the conal angle and assume that the objects within this angle of previous movements are most likely to be the same as before. However, this may not be sufficient if the objects can move backward as well as forward.
- When the expected direction of motion can change at any moment and the movement is essentially chaotic we can use a Brownian motion algorithm which looks for candidates anywhere within a search radius of a previous position and assumes the closest one is the most likely.
|
Linear Regression |
|
|
|
Conal Angle |
|
|
|
Brownian Motion |
|
|
The size of the search radius, in all cases, must be set in line with the expected movement from one timepoint to the next, bearing in mind the need to reduce this distance to a practical range during the acquisition of the images.
When selecting Linear Regression or Conal Angle, additional parameters need to be set.
In both cases we can set the "Max time points" option to define how many time points to use to calculate the direction of movement.
In the case of Conal Angle, we also need to set the maximum permitted deviation from previous directions.
Fusions and Divisions
Sometimes, tracking involves fusions and divisions of tracks.
If fusions are allowed and only one segmented object can be found within the search radius of where two objects were found previously, the algorithm will assume that those two objects merged into a single one, and the tracks will merge.
Likewise, if divisions are allowed and two objects are found in the search radius of a track where only one existed previously, the algorithm will assume that the object divided or split and the tracking will continue along both branches.
Some points of note:
- The algorithm has no ability to differentiate between intended and accidental splits and fusions. To limit the number of errors it is important to optimize the segmentation to reduce the number of unintended splits.
- Allowing fusions and divisions increases the possibilities for error. It is best not to use these options unless the purpose of the tracking task is to identify fusions and divisions.
Additional options relating to tracking fusions and divisions are available and described in the help files.
Weighing
Another method used to optimized tracking when there can be multiple likely candidates within the search radius is to use weighing to prioritize objects that are more similar the the object in the previous time point. Weighing can be used with any features of an object, such as size, shape or intensity values, and multiple features can be used to more specifically prioritize certain objects based on their similarity to the objects in the previous time point.
Note that using weighing can lead to incorrect track identification if the objects undergo significant intensity or morphology changes as they move through the time series. This usually means that using weighing to improve track accuracy is unlikely to succeed when tracking dividing cells for example.