Quantifying contacts over time
Measuring how often and how long some objects come into contact with each other can be a useful tool in biological relationship analysis. This guide explains how grouping combined with tracking can provide this information.
See also
Segmenting Objects
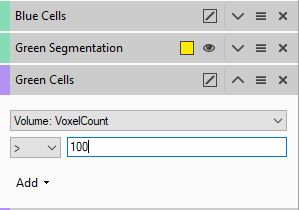
The key to identifying interactions is to tag subjects based on their proximity to or overlap with reference objects. To enable this step both types of objects must first be segmented and classified. Use any segmentation tool that is appropriate and use filters if necessary to identify only those segmented objects that are likely subject by, for example, not tagging objects outside of specific volume ranges or other features.
Tagging contact events
Once both types of objects have been identified (more can be added if needed), the next step is to identify points of interaction. This can be based on proximity (if a subject-object is within a certain distance of a reference-object), or overlap (if part or whole of a subject-objects is within the bounds of a reference-object).
The distance operation can be used if a specified distance is enough.
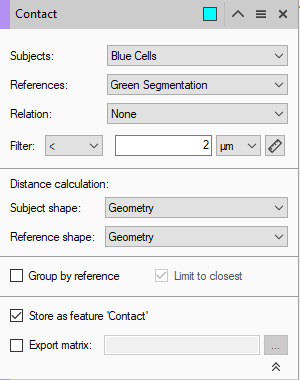
In this case, we have configured the operation in the following way:
- Renamed the operation so the tag attached to the objects is "contact" for ease of reading the pipeline and results.
- Set the operation to change the colour of tagged objects to Cyan to easily spot interactions in the viewer.
- Set the subject to be the objects that will be tracked and whose interaction we want to measure and set the reference be those the subjects come into contact with.
- Set the filter to be a distance below 2um. The distance, in this case, was set to be fairly generous due to the processing and segmentation of the objects, but it can be set to any value as needed, even 0, meaning that objects must touch for an interaction to be inferred.
- Set the distance calculation to be based on the proximity of the geometries of both the subjects and references.
- While the option to store the distance feature is on, it is unnecessary for the purpose of tagging.
Alternative ways to tag contact can also work. If the Distances operator is unpractical because it is too much computing for the image using a distance map is absolutely fine. Also, it is possible to use the Compartments operation if contact is limited to the overlap of objects.
Tracking objects
Having tagged contact events we can then go on to tracking the objects.
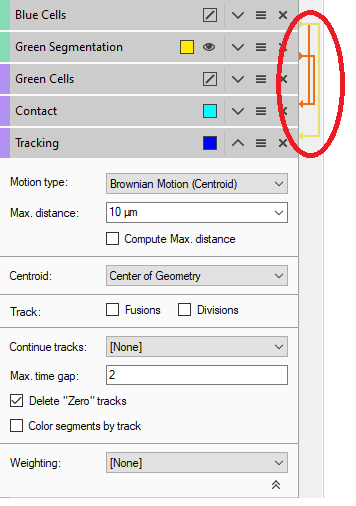
Here the tracking operator is configured as follows:
- The input for the tracking operation is all the cells that can make contact, whether they do or not is not important at this stage. Use the menu in the operation title bar of the operation to select the input.
- The track colouring is fixed This is done so that we can more easily visualise contact events in the viewer later by combining the track colour with the object colour.
- The tracking parameters have been set according to the specific dataset. Check the knowledge base article on tracking for more information.
- The option to colour segment by tracks has been disabled so that the object colours are maintained.